


























-
Macchina per test elettromeccanici universali
- Macchina per test universale idraulico
- Sistemi di test automatizzati
-
Macchina per test di trazione orizzontale
-
Macchina per il test del cuscinetto elastomerico
-
Macchina per test di compressione
-
Macchina di test di creep ad alta temperatura
- Sistemi di test di impatto
-
Sistemi di test dinamici
-
Macchina per test di torsione
-
Melmit di test
- Macchina di test speciale
- Macchina per test non metal
- Tester di durezza
- Attrezzatura di preparazione metallografica
-
Microscopio
Macchina per test di impatto a pendolo NDT

1.2.1.1. Sistema operativo controllato elettronicamente:
Adottando la modalità di funzionamento del touch dello schermo dell'interfaccia man-machine, selezionare prima il tipo di campione corrispondente sul touchscreen in base al tipo di campione e impostare vari parametri di prova, come: peso del martello, set altezza della caduta, energia, numero di campione e simili. E inseriscilo sul touchscreen o inserisci direttamente l'energia di impatto richiesta. Premere il pulsante preparatorio, in questo momento, la macchina di prova solleverà automaticamente il martello all'altezza impostata. L'operatore prenderà il campione che ha raggiunto il requisito di temperatura costante dall'incubatore, lo inserirà nel dispositivo di alimentazione del campione e spinge il campione nella tabella dell'incudine. Posizionamento superiore, fine, centratura automatica, chiusura della porta di protezione, avviando il pulsante del martello, il corpo del martello cade automaticamente, completa il test di impatto a singolo pezzo. Finestra di visualizzazione dei dati di prova. Dopo aver completato l'impatto, premere nuovamente il pulsante preparatorio e il meccanismo del martello di blocco afferrerà automaticamente il martello e solleverà il martello. Allo stesso tempo, il dispositivo di consegna del campione può essere riportato sul dispositivo iniziale e in attesa del secondo test di impatto. L'operazione manuale manuale può essere eseguita quando il sistema automatico si guasta. Quando viene ispezionata l'attrezzatura, il personale di manutenzione può eseguire operazioni passo-passo sulle azioni di ciascuna unità.
1.2.1.2. Sistema di controllo a bassa temperatura (il sistema a bassa temperatura non è menzionato in questa gara)
Intervallo di controllo della temperatura: temperatura ambiente ~ -80 ° C, precisione del controllo della temperatura ≤ 0,5 ° C, gradiente di temperatura ≤ 2 ° C. Il tempo di riscaldamento più lungo: temperatura ambiente ~ -100 ° C <2 ore. Il dispositivo può contemporaneamente posizionare 6-8 campioni P-2. Il campione ha una funzione di agitazione per garantire l'uniformità della temperatura in presenza di un mezzo di raffreddamento. La variazione della temperatura è stata osservata direttamente sul display digitale di controllo della temperatura. Il sistema di refrigerazione utilizza un raffreddamento duplex a due stadi e una doppia pompa. Ha una funzione di prompt del tempo di temperatura costante e quando raggiunge il tempo di temperatura costante impostato, ci sarà un suono di picco.
1.2.1.3. Dispositivo di alimentazione e dispositivo di centraggio
Elimina manualmente il campione standard dal criostat e mettilo nel dispositivo di alimentazione. Il dispositivo adotta il meccanismo della manovella e spinge il corrimano per inviare il campione all'incudine. È incentrato automaticamente e non è necessario assumere il dispositivo di alimentazione. Dopo il completamento dell'impatto, il dispositivo di alimentazione e il materiale di scarto vengono riportati nella posizione iniziale per attendere il posizionamento del secondo campione. Adatto per campioni P-2, P-3, P-4. Il dispositivo di centraggio è montato sull'incudine e la fine del campione è posizionata per la regolazione degli errori.
1.2.1.4. Sistema ospite
La macchina principale è composta da un meccanismo di trasmissione, un componente corporeo a martello, un meccanismo di sollevamento, un dispositivo di localizzazione del martello, una guida guida, un telaio della base e simili.
UN. meccanismo di trasmissione
È dotato di un motore giapponese in marcia Shima e ha un freno di spostamento. Se il motore si blocca e l'intero sistema di trasmissione si interrompe durante un improvviso guasto dell'alimentazione durante l'aumento o la caduta del martello, può impedire al martello di scivolare e incidente.
B. Parti del martello
Il corpo a martello adotta la struttura generale del pezzo in acciaio fuso, la rigidità è buona, il pugno e il corpo del martello sono combinati e viene utilizzato il materiale in acciaio in lega di alta qualità, la durezza raggiunge HRC58-62 e il raggio di curvatura R25 del pugno. La parte superiore del corpo del martello è dotata di una struttura di auto-blocco del gancio.
C. Meccanismo di sollevamento
Adottando la modalità di trasmissione della catena di pignone, la velocità di sollevamento è di 1,1 m/min, abbassando lentamente il martello di blocco e sollevando il martello. L'interruttore di controllo limite è installato e arrestato automaticamente.
D. Sollevamento del dispositivo di tracciamento del martello
Attraverso l'abbattimento del dispositivo di tracciamento del martello, il corpo del martello viene automaticamente bloccato dopo il contatto con il corpo del martello e il corpo articolare viene lentamente sollevato sotto l'azione del meccanismo di sollevamento. Dopo aver raggiunto l'altezza impostata, il componente limite trasmette rapidamente un segnale per impedire la rotazione del sistema di trasmissione e il martello si interrompe all'altezza del set. Quando viene ricevuto il comando Impact, il dispositivo a martello Lock rilascia rapidamente il corpo del martello e si muove liberamente lungo la guida guida. Completa il test di impatto. Il martello del blocco e il meccanismo di rilascio hanno un dispositivo di auto-blocco e il fenomeno del gancio non si verifica in caso di un improvviso guasto dell'alimentazione. Sicuro e affidabile.
e. Guide Rail
Viene elaborato in una superficie liscia con due tubi in acciaio senza cuciture φ54 × 12 e quindi cromati.
F. frame cornice
La base è realizzata in materiale in acciaio fuso ZG45. La colonna adotta quattro tubi in acciaio senza cuciture φ83 × 12 e la piastra superiore è realizzata con una piastra in acciaio spessa per garantire i requisiti di rigidità e resistenza.
1.2.1.5. Dispositivo di sciopero antis-secondario
Due superfici del tavolo di lavoro sono rispettivamente montate sulla base della posizione di atterraggio del corpo del martello e un meccanismo a leva elettromagnet a push è montato sulla superficie del tavolo. Quando la lama del martello colpisce il campione, il segnale fotoelettrico viene trasmesso istantaneamente all'elettromagnete per spingere la leva. Spingendo il blocco di sciopero antis-secondario nel gap del martello che rimbalza verso l'alto, sostenendo il martello a goccia e non causando la caduta della lama del martello due volte, impedendo effettivamente lo sciopero "secondario".
1.2.1.6. Dispositivo di protezione della sicurezza
Adotta un dispositivo di protezione in maglia in acciaio alta 1 m ed è dotato di dispositivo di controllo elettrico per chiudere la porta. La porta protettiva non è chiusa e il sistema operativo è sempre chiuso e non può essere avviato.
1.2.1.7. Sistema di acquisizione dei dati
L'albero di uscita del motore è montato coassiale con un encoder rotante importato dalla Corea del Sud. La sua alta precisione e risoluzione di 0,1O possono controllare accuratamente l'accuratezza della posizione di sollevamento.
Precedente:Macchina di prova del motore di calore isolante
Prossimo:Pendulum Impact Test Machine
Puoi anche contattarmi via e -mail. Il mio indirizzo email è info@shhualong.com
Prodotti consigliati

Macchina per prove di flessione servoelettroidraulica a tre cilindri LWC-300/500/1000/2000 - Serie LWC

WCJ-20000/50000/100000 Macchina per prove di impatto con peso di caduta dei metalli completamente automatica (DWTT) - Serie WCJ

Macchina robotizzata per prove di impatto a pendolo completamente automatica - Serie CBD-DR
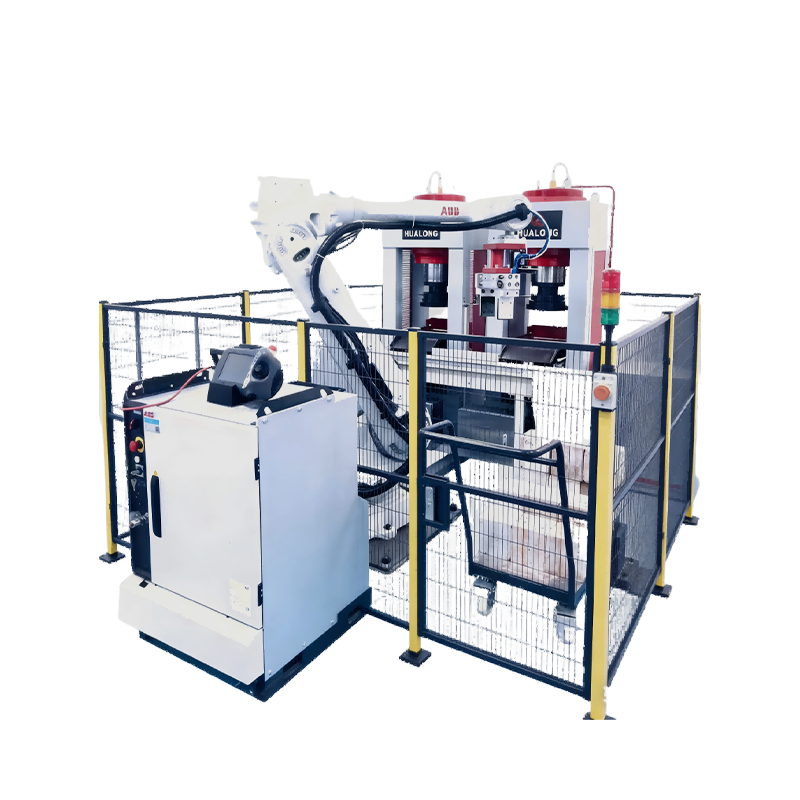
Sistema di polimerizzazione robotizzata e test di resistenza alla compressione completamente automatizzato - Serie WHY-G
Hai bisogno di aiuto o avere una domanda?
Per ulteriori informazioni su come Hualong può aiutare la tua azienda a profitto attraverso i test, fai clic sul pulsante.FRIEND LINK:
N. 389 Chuanhong Road, Pudong New Area, Shanghai 201202, Cina
Tel: +86 17821945087
Online Service: 7*24h






© 2018 HUALONG All rights reserved. SiteMap
